Kymco27000
Tout ce qui a été posté par Kymco27000
-
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
non c'est bon me dites pas! ....en plus j aime pas avoir tord....:) bon j'ai fini la prog....j recharge le Nikkon et j envois une vidéo..... -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
moi j'pense que j'ai raison....! une fois de plus...;) -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
vu que j vais en faire un blog j voudrai pas trop raconter de conneries...en tout cas le resultat me parait cohérent.... il est bon mon cf avec la 1349? moi j pense que oui et mon chat me confirme donc.... ? oui dsl j'ai pas pu nourrir le thread plus tôt j me posais une question existentielle concernant la meta-modelisation du comportement d'un modèle de processus à la con... en résumé avec la norme j1349 je dois appliquer un coef de 1,05 à la puissance calculée pour une pression atmosphérique de 1019mbar et 38% d'humidité résiduelle!?.... c'est raisonnable? ....si vous pouviez éviter les réponses du genre....genre celle de ma femme: " tu te pose trop de questions!".... .ça m'arrangerait bien! -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
Syntaxe error j suis encore dessus j suis pas mort....:) j'ai un doute......ai-je raison quand j dis : (j suis avec les facteurs de correction iso mes couilles et machin chouette j1349) ... on va partir de j1349..... cf= ((pression atmospherique - pression partiel) / (990-13))*((302,4/(température ambiante +273,15))^0,5)...... avec pression partiel = (humidité relative /100) * vapeur saturante avec vapeur saturante = ((log10( 8,07131-1730,63/(233,426+température ambiante))/750,0617)*1000) ....j'ai un doute suis-je correcte? :/? -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
Rien ne vaut une bonne TI82! ....bref..... Avancement de l'appli pour faire-marcher le truc... ...ça avance à grandes pattes...(mode simulation sur la table de la cuisine) c'est pas fini bien sûr.... mais on a tout le temps... ... moi j dis ....c'est exceptionnellement pas mauvais pour un début! P.S.: Bon Ok! le logo j en avais pas d autre sous la main, dsl...mais ça n'a aucun but commerciale mon truc ! ...Please,,,Don't put the blame on me ! P.S.2.: en même temps il est mieux votre logo avec un peu de perspective.... -
scooter mbk - yamaha Booster spirit démarre mal après changement cylindre
Kymco27000 a répondu à un(e) sujet de Lwëvan dans Diagnostic de panne
j etais en brh7 sur peugeot origine et 8 sur kymco origine......perso je garderai la 8 sur ton scoot mais sûrement pas la 9... par expérience.....sauf si tu veux ajouter à tes problèmes des ratés à l'allumage......le piston n'a pas de trace suspecte sur le dessus?(genre amorce dû à une bougie trop chaude?) (y a pas la photo...) elle a l aire bien humide ta bougie? t'aurais pas un problème de starter automatique? (le problème c'est pour le tester ....en générale il faut que le moteur soit démarré pour verifier que qu il marche....là j'ai pas d idee pour le tester ....y a bien un truc avec du papier maché....mais c'est crado alors j prefere pas en parler.... ton réglage de richesse est cohérent? 1,5 tr à 2tr.max? j veux dire pas 4 ou 8....? ....et tu les as fait à chaud ces réglages ....je sais s'il cale c'est pas evident... moi perso j pense au starter qui reste passant ou au réglage richesse/gicleur trop riche....redescends ton gicleur de 5 en 5....si t'en as sous la main! -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
non lol....j avais fais couple moteur = couple roue x rapport de démultiplication...mais ça marche pas bien....:( ... alors j vais prendre Cmoteur x Wmoteur = Croue x WRoue....... du coup y n' en fait plus que 37chevaux... ...... mdr....non j suis en simulation sur le pc......j sais pas programmer une asymptote m'en voulez pas..... ....j'ai jamais été à l'école.... on va le foutre a la benne ce mathlab ça me gonfle lol... -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
merde j crois que y a une boulette dans mes calculs .... y fait pas 111 cv mon scoot ? si? -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
non mais si quelqu un qui passe par là et qui peut me dire pkoi mon Chart il fait planter l'horloge du pc j suis preneur....:).....non j'ai mis cà là comme ça si mon pc est vide demain j saurai retrouver le code.... non serieux c'est pas totalement mauvais c que j'ai fais...manque juste un truc....:( mais j sais pas encore quoi.... y disent un "delegate" sur la liaison serie mais ça fait tout péter le code...alors j vais attendre, dormir un peu ...et aviser ensuite....;) -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
Faut que je me trouve un homme à abattre... >:( ou une solution à ce blème... Ptain ce matin j me lève ...plus rien dans le programme VB...la loose j'ai dû tout réécrire....ça m'a pris 3 minutes lol ... donc j vais utilisé ce bloc note c'est bien !... Imports System Imports System.IO.Ports Imports System.Threading Public Class Form1 Dim comPORT As String Dim receivedData As String = "" Dim commandCount As Integer = 0 Dim Pi As Decimal = 3.1415927 Dim NbDec As Integer = 2 Dim start As Boolean = False 'Valeurs initiales modifiables Dim Interval As Integer = 50 Dim MassRouleau As Decimal = 35.02 Dim DiamRouleau As Decimal = 0.3 Dim MassScoot As Integer = 65 Dim MassPilote As Integer = 65 Dim RatioPilRoue As Decimal = 0.6154 Dim g As Decimal = 9.81 Dim CircRoue As Decimal = 1.46 Dim CoefFr As Decimal = 0.8 Dim CoefRl As Decimal = 20.0 'Valeurs enregistrées non-modifiables Dim TempAmb As Integer = 0 Dim TempMot As Integer = 0 Dim TrMinVilbIni As Integer = 980 Dim TrMinVilbFin As Integer = 0 Dim TrMinRoueIni As Integer = 0 Dim TrMinRoueFin As Integer = 0 'Valeurs calculées non-modifiables Dim MIRoul As Decimal = 0.5 * MassRouleau * ((DiamRouleau / 2) * (DiamRouleau / 2)) Dim RayRoue As Decimal = CircRoue / (2 * Pi) Dim VitVIni As Decimal = 0 Dim VitVFin As Decimal = 0 Dim VitAngVIni As Decimal = 0 Dim VitAngVFin As Decimal = 0 Dim VitAngRIni As Decimal = 0 Dim VitAngRFin As Decimal = 0 Dim AccAng As Decimal = 0 Dim EffTang As Decimal = 0 Dim CplResRl As Decimal = 0 Dim RapDem As Decimal = 0 Dim VitRoueKMH As Decimal = 0 Dim CplRoue = 0 Dim CplMot = 0 Dim PssWt = 0 Dim PssCv = 0 Public Sub Timer1_Tick(ByVal sender As Object, ByVal e As EventArgs) Handles Timer1.Tick If (TrMinVilbFin > TrMinVilbIni) Then Dim DN As String = Date.Now DataGridView1.Rows.Add(DN, Label1.Text, Label2.Text, Label3.Text, Label4.Text) Chart1.Series(0).Points.AddXY(Label3.Text, Label1.Text) Chart1.Series(1).Points.AddXY(Label3.Text, Label2.Text) Chart1.Series(2).Points.AddXY(Label3.Text, Label4.Text) ElseIf TrMinVilbFin <= TrMinVilbIni Then Timer1.Enabled = False End If End Sub Function ReceiveSerialData() As String ' returns new data from the serial connection Dim Incoming As String Try Incoming = SerialPort1.ReadExisting() If Incoming Is Nothing Then Return "nothing" & vbCrLf Else Return Incoming End If Catch ex As TimeoutException Return "Error: Serial Port read timed out." End Try End Function Function parseData() ' uses the global variable receivedData Dim pos1 As Integer Dim pos2 As Integer Dim length As Integer Dim newCommand As String Dim done As Boolean = False While (Not done) pos1 = receivedData.IndexOf("<") + 1 pos2 = receivedData.IndexOf(">") + 1 'occasionally we may not get complète data and the end marker will be in front of the start marker ' for exampe "55><" ' if pos2 < pos1 then remove the first part of the string from receivedData If (pos2 < pos1) Then receivedData = Microsoft.VisualBasic.Mid(receivedData, pos2 + 1) pos1 = receivedData.IndexOf("<") + 1 pos2 = receivedData.IndexOf(">") + 1 End If If (pos1 = 0 Or pos2 = 0) Then ' we do not have both start and end markers and we are done done = True Else ' we have both start and end markers length = pos2 - pos1 + 1 If (length > 0) Then 'remove the start and end markers from the command newCommand = Mid(receivedData, pos1 + 1, length - 2) ' show the command in the text box ' RichTextBox1.AppendText(newCommand & vbCrLf) 'remove the command from receivedData receivedData = Mid(receivedData, pos2 + 1) 'A for ambiant température If (newCommand.Substring(0, 1) = "A") Then Label1.Text = newCommand.Substring(1, 3) End If '(newCommand.Substring(0, 1) = "A") 'M for motor température If (newCommand.Substring(0, 1) = "M") Then Label2.Text = newCommand.Substring(1, 3) End If '(newCommand.Substring(0, 1) = "M") 'V for vilebrequin speed If (newCommand.Substring(0, 1) = "V") Then Label3.Text = newCommand.Substring(1, 5) End If '(newCommand.Substring(0, 1) = "V") 'R for Rear wheel speed If (newCommand.Substring(0, 1) = "R") Then Label4.Text = newCommand.Substring(1, 5) End If '(newCommand.Substring(0, 1) = "R") VitVIni = VitVFin VitAngRIni = VitAngRFin Label40.Text = Math.Round(VitAngRIni, NbDec) VitAngVIni = VitAngVFin Label38.Text = Math.Round(VitAngVIni, NbDec) TrMinVilbFin = Label3.Text Label49.Text = TrMinVilbFin VitAngVFin = (2 * Pi * TrMinVilbFin) / 60 Label39.Text = Math.Round(VitAngVFin, NbDec) TrMinRoueFin = (Label4.Text * (DiamRouleau / 2)) / RayRoue VitVFin = (TrMinRoueFin * CircRoue) / 60 VitAngRFin = (2 * Pi * TrMinRoueFin) / 60 VitRoueKMH = (TrMinRoueFin * 60) / 1000 Label41.Text = Math.Round(VitAngRFin, NbDec) AccAng = ((VitAngRFin - VitAngRIni) / (Interval / 1000)) Label42.Text = Math.Round(AccAng, NbDec) EffTang = ((MassScoot + (MassPilote * RatioPilRoue)) * CoefFr) * ((VitVFin - VitVIni) / (Interval / 1000)) Label36.Text = Math.Round(EffTang, NbDec) RapDem = TrMinRoueFin / TrMinVilbFin Label44.Text = Math.Round(RapDem, NbDec) Label45.Text = Math.Round(VitRoueKMH, NbDec) CplRoue = ((EffTang * RayRoue) + (MIRoul) + (CplResRl)) * AccAng Label46.Text = Math.Round(CplRoue, NbDec) CplMot = CplRoue * RapDem Label47.Text = Math.Round(CplMot, NbDec) PssCv = (CplMot * TrMinVilbFin * (Pi / 30)) / 735.5 Label50.Text = Math.Round(PssCv, NbDec) PssWt = PssCv * 735.5 Label48.Text = Math.Round(PssWt, NbDec) commandCount = commandCount + 1 commandCountVal_lbl.Text = commandCount End If ' (length > 0) End If '(pos1 = 0 Or pos2 = 0) End While End Function Private Sub connect_BTN_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles connect_BTN.Click If (connect_BTN.Text = "Connect") Then If (comPORT <> "") Then SerialPort1.Close() SerialPort1.PortName = comPORT SerialPort1.BaudRate = 115200 SerialPort1.DataBits = 8 SerialPort1.Parity = Parity.None SerialPort1.StopBits = StopBits.One SerialPort1.Handshake = Handshake.None SerialPort1.Encoding = System.Text.Encoding.Default 'very important! SerialPort1.ReadTimeout = 10000 SerialPort1.Open() connect_BTN.Text = "Dis-connect" comPort_ComboBox.Enabled = False BackgroundWorker1.RunWorkerAsync() Else MsgBox("Select a COM port first") End If Else SerialPort1.Close() connect_BTN.Text = "Connect" comPort_ComboBox.Enabled = True comPort_ComboBox.Text = String.Empty End If End Sub Private Sub comPort_ComboBox_SelectedIndexChanged_1(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles comPort_ComboBox.SelectedIndexChanged If (comPort_ComboBox.SelectedItem <> "") Then comPORT = comPort_ComboBox.SelectedItem End If End Sub Private Sub Form1_Load(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles MyBase.Load Control.CheckForIllegalCrossThreadCalls = False 'Valeurs initiales modifiables NumericUpDown1.Value = Interval TextBox1.Text = MassRouleau TextBox2.Text = DiamRouleau TextBox4.Text = MassScoot TextBox3.Text = MassPilote TextBox15.Text = RatioPilRoue TextBox6.Text = g TextBox5.Text = CircRoue TextBox20.Text = CoefFr TextBox21.Text = CoefRl 'Valeurs enregistrées non-modifiables Label1.Text = TempAmb Label2.Text = TempMot Label3.Text = TrMinVilbIni Label4.Text = TrMinRoueIni Label49.Text = TrMinRoueIni 'Valeurs calculées non-modifiables Label35.Text = Math.Round(MIRoul, NbDec) Label43.Text = Math.Round(RayRoue, NbDec) Label40.Text = 0 Label38.Text = 0 Label39.Text = 0 Label47.Text = 0 Label46.Text = 0 Label50.Text = 0 Label48.Text = 0 Label44.Text = 0 Label45.Text = 0 Label41.Text = 0 Label42.Text = 0 Label36.Text = Math.Round(EffTang, NbDec) CplResRl = ((MassScoot + (MassPilote * RatioPilRoue)) * (CoefRl / 1000)) Label37.Text = Math.Round(CplResRl, NbDec) Timer1.Enabled = False comPORT = "" For Each sp As String In My.Computer.Ports.SerialPortNames comPort_ComboBox.Items.Add(sp) Next End Sub Private Sub SaveParam() 'Valeurs initiales modifiables Interval = NumericUpDown1.Value MassRouleau = TextBox1.Text DiamRouleau = TextBox2.Text MassScoot = TextBox4.Text MassPilote = TextBox3.Text RatioPilRoue = TextBox15.Text g = TextBox6.Text CircRoue = TextBox5.Text CoefFr = TextBox20.Text CoefRl = TextBox21.Text 'Valeurs enregistrées non-modifiables Label1.Text = TempAmb Label2.Text = TempMot Label3.Text = TrMinVilbIni Label4.Text = TrMinRoueIni 'Valeurs calculées non-modifiables MIRoul = 0.5 * MassRouleau * ((DiamRouleau / 2) * (DiamRouleau / 2)) Label35.Text = Math.Round(MIRoul, NbDec) RayRoue = CircRoue / (2 * Pi) Label43.Text = Math.Round(RayRoue, NbDec) Label36.Text = Math.Round(EffTang, NbDec) CplResRl = ((MassScoot + (MassPilote * RatioPilRoue)) * (CoefRl / 1000)) Label37.Text = Math.Round(CplResRl, NbDec) End Sub Private Sub CalculDynamic() VitVIni = VitVFin VitAngRIni = VitAngRFin Label40.Text = Math.Round(VitAngRIni, NbDec) VitAngVIni = VitAngVFin Label38.Text = Math.Round(VitAngVIni, NbDec) TrMinVilbFin = Label3.Text Label49.Text = TrMinVilbFin VitAngVFin = (2 * Pi * TrMinVilbFin) / 60 Label39.Text = Math.Round(VitAngVFin, NbDec) TrMinRoueFin = (Label4.Text * (DiamRouleau / 2)) / RayRoue VitVFin = (TrMinRoueFin * CircRoue) / 60 VitAngRFin = (2 * Pi * TrMinRoueFin) / 60 VitRoueKMH = (TrMinRoueFin * 60) / 1000 Label41.Text = Math.Round(VitAngRFin, NbDec) AccAng = ((VitAngRFin - VitAngRIni) / (Interval / 1000)) Label42.Text = Math.Round(AccAng, NbDec) EffTang = ((MassScoot + (MassPilote * RatioPilRoue)) * CoefFr) * ((VitVFin - VitVIni) / (Interval / 1000)) Label36.Text = Math.Round(EffTang, NbDec) RapDem = TrMinRoueFin / TrMinVilbFin Label44.Text = Math.Round(RapDem, NbDec) Label45.Text = Math.Round(VitRoueKMH, NbDec) CplRoue = ((EffTang * RayRoue) + (MIRoul) + (CplResRl)) * AccAng Label46.Text = Math.Round(CplRoue, NbDec) CplMot = CplRoue * RapDem Label47.Text = Math.Round(CplMot, NbDec) PssCv = (CplMot * TrMinVilbFin * (Pi / 30)) / 735.5 Label50.Text = Math.Round(PssCv, NbDec) PssWt = PssCv * 735.5 Label48.Text = Math.Round(PssWt, NbDec) End Sub Private Sub Button1_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button1.Click BackgroundWorker1.RunWorkerAsync() End Sub Private Sub Button2_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button2.Click Label3.Text = Label3.Text + 100 Label4.Text = Label3.Text * 0.25 End Sub Private Sub Button3_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button3.Click SaveParam() End Sub Private Sub Button5_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button5.Click Button5.Enabled = False Button7.Enabled = True DataGridView1.Rows.Clear() Chart1.Series(0).Points.Clear() Chart1.Series(1).Points.Clear() Chart1.Series(2).Points.Clear() Chart1.Series(3).Points.Clear() BackgroundWorker2.RunWorkerAsync() End Sub Private Sub BackgroundWorker1_DoWork(ByVal sender As System.Object, ByVal e As System.ComponentModel.DoWorkEventArgs) Handles BackgroundWorker1.DoWork Do ' get any new data and add the the global variable receivedData receivedData = ReceiveSerialData() 'If receivedData contains a "<" and a ">" then we have data If ((receivedData.Contains("<") And receivedData.Contains(">"))) Then parseData() If (TrMinVilbFin <= TrMinVilbIni) Then Thread.Sleep(500) Timer1.Enabled = False End If End If Loop End Sub Private Sub BackgroundWorker1_RunWorkerCompleted(ByVal sender As System.Object, ByVal e As System.ComponentModel.RunWorkerCompletedEventArgs) Handles BackgroundWorker1.RunWorkerCompleted Close() End Sub Private Sub Button6_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button6.Click CalculDynamic() End Sub Private Sub Button7_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button7.Click Button5.Enabled = True Button7.Enabled = False Timer1.Enabled = False Dim MaxPVal As Double = 0 Dim RowPNb As Double = 0 Dim MaxCVal As Double = 0 Dim RowCNb As Double = 0 For Each row As DataGridViewRow In DataGridView1.Rows If row.Cells(7).Value > MaxPVal Then MaxPVal = row.Cells(7).Value RowPNb = row.Cells(7).RowIndex End If If row.Cells(5).Value > MaxCVal Then MaxCVal = row.Cells(5).Value RowCNb = row.Cells(5).RowIndex End If Next Label51.Text = MaxPVal Label52.Text = DataGridView1.Rows.Item(RowPNb).Cells.Item(3).Value Label53.Text = MaxCVal Label54.Text = DataGridView1.Rows.Item(RowCNb).Cells.Item(3).Value End Sub Private Sub BackgroundWorker2_DoWork(ByVal sender As System.Object, ByVal e As System.ComponentModel.DoWorkEventArgs) Handles BackgroundWorker2.DoWork Do If (TrMinVilbFin > TrMinVilbIni) Then Dim DN As String = Date.Now DataGridView1.Rows.Add(DN, Label1.Text, Label2.Text, Label3.Text, Label4.Text) Chart1.Series(0).Points.AddXY(Label3.Text, Label1.Text) Chart1.Series(1).Points.AddXY(Label3.Text, Label2.Text) Chart1.Series(2).Points.AddXY(Label3.Text, Label4.Text) Thread.Sleep(NumericUpDown1.Value) ElseIf TrMinVilbFin <= TrMinVilbIni Then Thread.Sleep(NumericUpDown1.Value) Timer1.Enabled = False End If Loop End Sub End Class Au moins ce sera pas perdu pour tout le monde... -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
c'est qui vos concurent scooter system? justepour info? s'il vous plaît? j me sent d une humeur taquine ces temps ci..... -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
oki 03h08 j viens de dépasser les limites .... oki mais m'ont chauffer les types aussi ! let's see what happen! http://forum.arduino.cc/index.php?topic=463506.0 non maman c'est pas ton fils qui a parlé comme cela non non je ne saurais points m'exprimer ainsi fichtre! quel odieux personnage.... ...si on vous demande vous me connaissez pas hein!? ....:( zavez pas une idee de forum sur lequel j pourrais poster ma requête? juste pour les emmerder....? -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
lol avant j vais aussi moucher le forum aduino...parceque j suis joueur... http://forum.arduino.cc/index.php?topic=463506.msg3182635#msg3182635 bon j dois avouer que j'ai la soluce au problème mais le temps joue contre moi...j attends des pieces de mon fournisseur radiospare et j pense les avoir que lundi au plus tôt...pour ça je taquine en attendant.....;) parcequ ils vont sûrement m enfermer avant... j sais pas si vous avez lu mes post sur futura sciences et les autres sur arduino mais moi j me fend la poire...c'est inconcevable d être comme je suis......honte à moi.... j espère que ma mère ne lira pas tout ça.... -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
lol "futura science" comment j viens de les moucher c'est bande de bouffons.....ce sont vraiment des guignoles... http://forums.futura-sciences.com/electronique/784343-tachymetre-scooter-50cc-cem-2.html#post5861009 franhement j aurais dû être comique j'ai loupé ma vocation... -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
ah oui j vais faire ça.... j vais prendre de belles photos et des jolis schémas.... j serais ravi d'aider ... -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
lol viens de m'arriver un truc cheloux à l'instant .....j viens de poster mon blème sur futura-sciences ....et les gens ne veulent pas me répondre parcqu ils pensent que je suis un professionelle .... c'est dingue....j bricole un truc du fond de mon garage avec peu de moyen et j expose mon problème et on m'envois bouler lol...parceque mes explication sont trop technique pour être un simple particuliers? loool...wtf ......le lien..... : http://forums.futura-sciences.com/electronique/784343-tachymetre-scooter-50cc-cem.html j suis boucheB! les bandes de fils de pute.....(censure chef) j pense que j vais avoir le même retour sur le forum arduino....faut pas se leurrer...https://forum.arduino.cc/index.php?topic=463506.0 jusque là pas de réponses mais j attends le pire..... putain d'enculés vous avez vu ces bandes de chiens? j vais me démerder tout seul comme d hab! et vive la France! -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
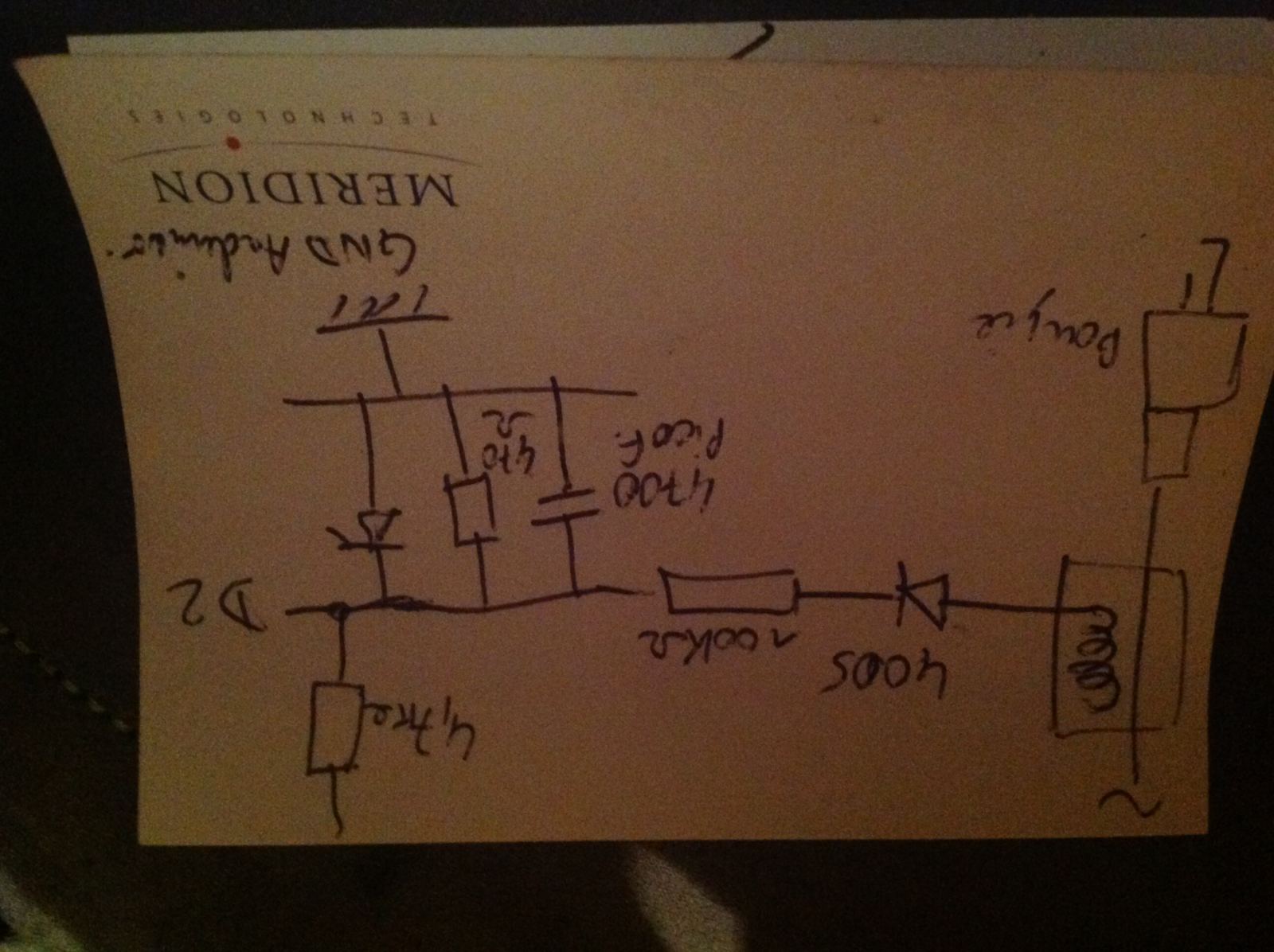
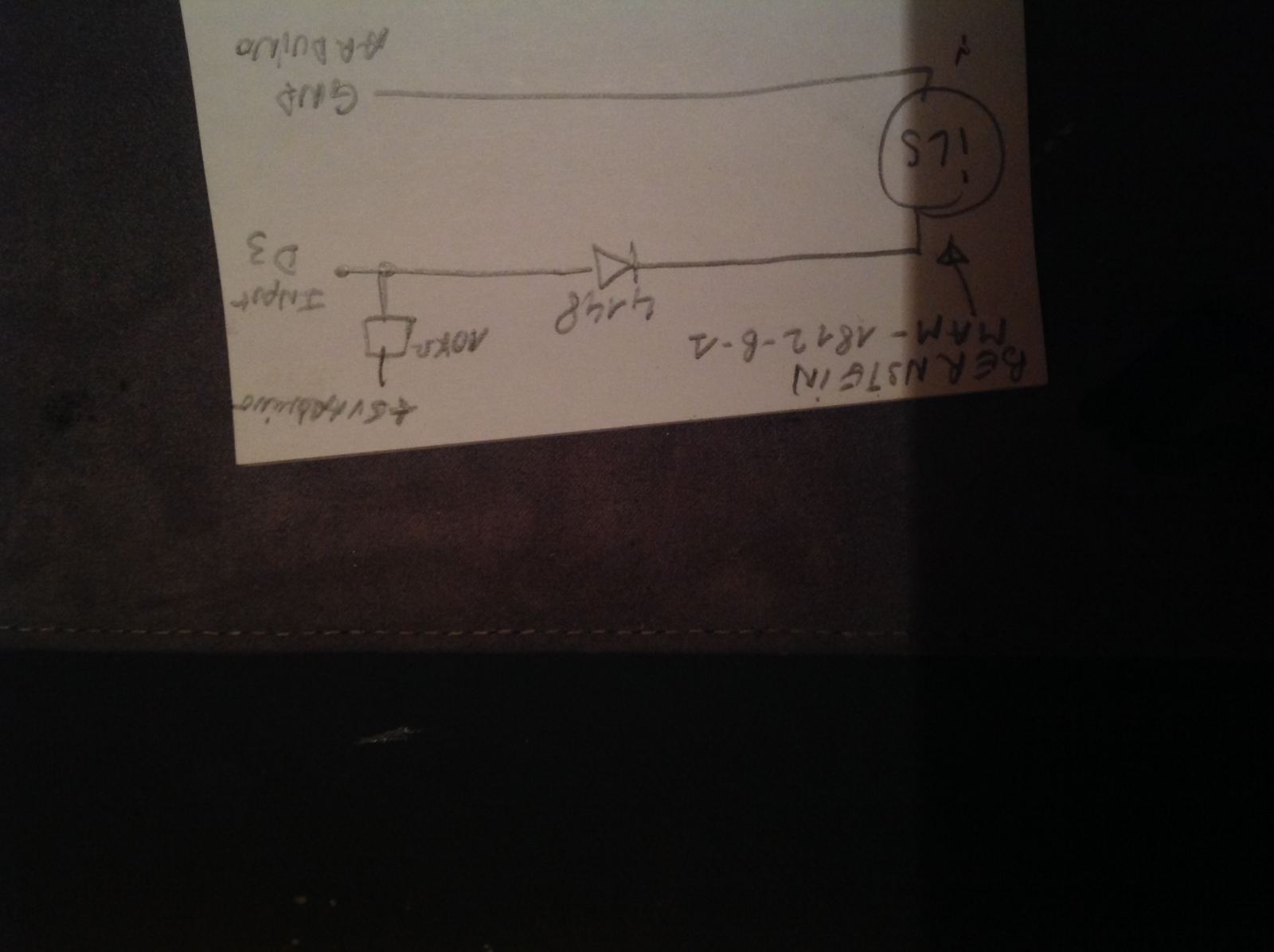
Et j tiens à préciser que j'irai pas me coucher tant que c'est pas réglé lol! >:) Bon pour les pti curieux j vais balancer mon circuit pour choper les tours minute sur l'antiparasite.....qui sait y a ptete un ingenieur ingénieux qui passera ici par hazard... oui je sais il est pas dans le bon sens....t'a qu'a tourner la tête.... et sur le capteur a effet hall....(qui soit dit en passant doit sûrement être un ILS en fait).....: pareil faut tourner la tête... p.s.: faudrait régler ce problème de photo qui s'affichent pas dans le bon sens ô grand chef administrateur (j'imagine que je ne suis pas le seul...)... ( sûrement une variable dans les metadata propre à ios... vous bossez sous windobe?n'est-ce pas..... )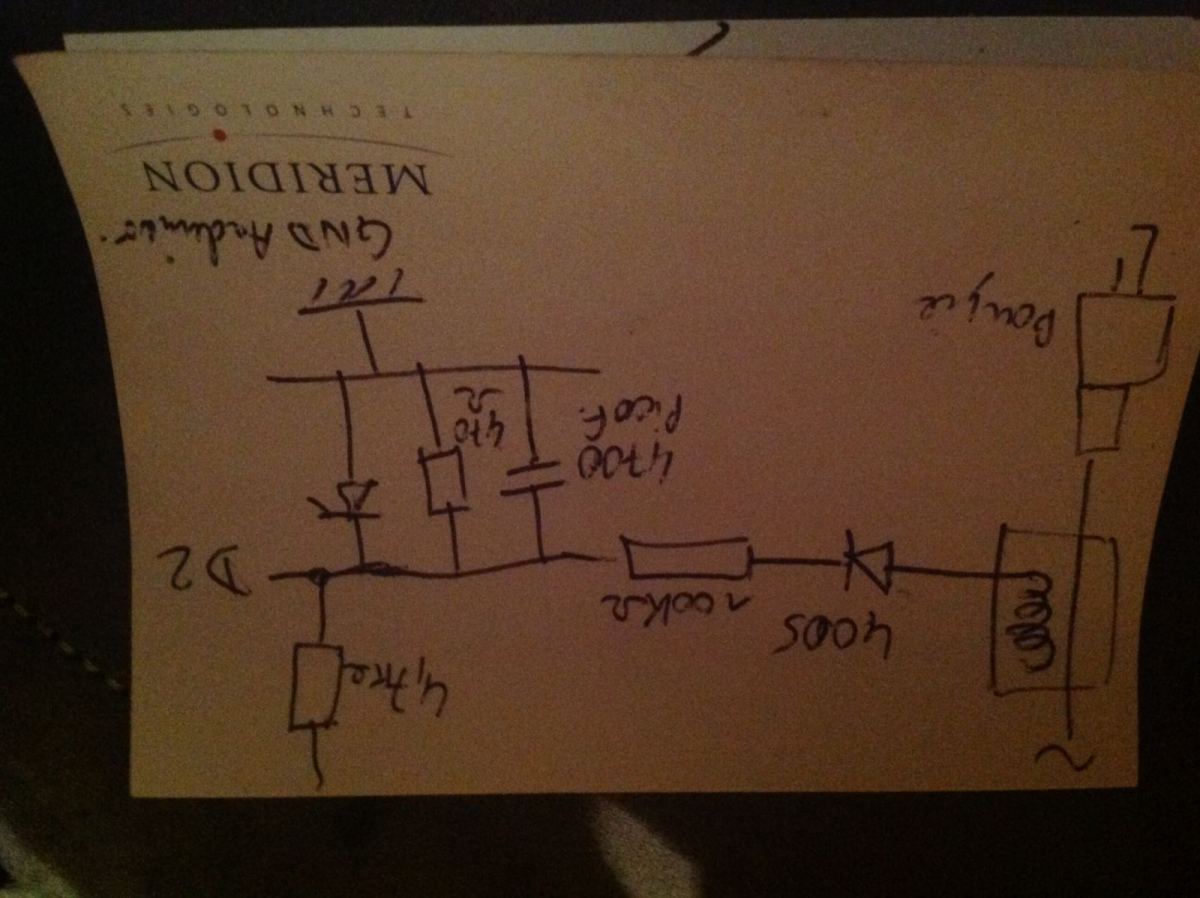
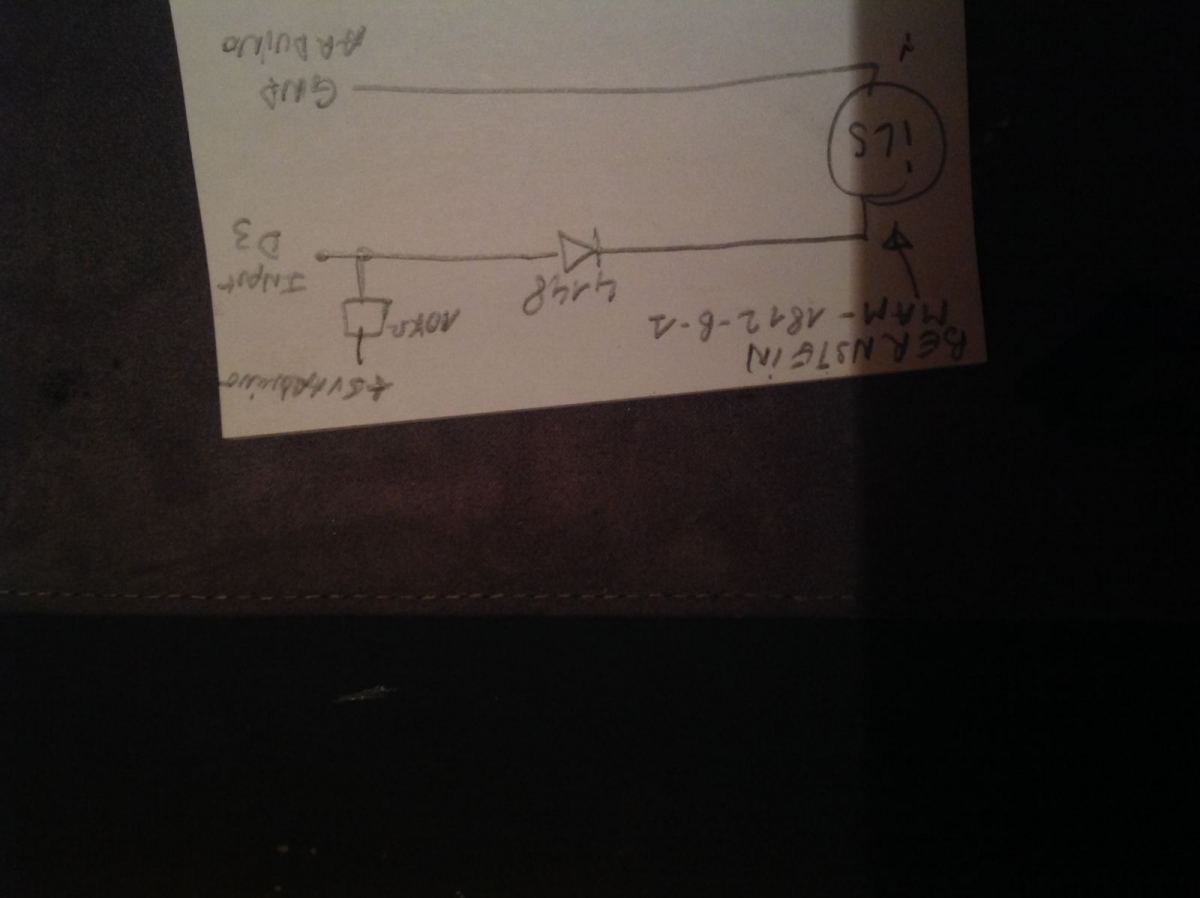
-
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
Merci Barry...il faut encore que je pauffine le truc parceque y a des parasites....on voit pas bien sur la vidéo mais au début quand le scoot est au ralenti le pc m indique entre 3 et 4 km/h sur la roue arrière alors que la roue ne tourne pas (bon ok je chipotte mais c'est mon côté perfectionniste! ....j vais creuser un peu pour remédier à ça... je re... -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
Bon c'est pas pour faire chier loin de moi cette idée mais ce truc http://www.mi-systems.fr/gb/banc50.htm j pense que ça marchera pas bien....les roue à inertie sont trop ptites non????....sauf si y a un frein rèostatique....mais vu la conception générale j pense pas que y en ait.... tu pourras pas simuler le couple suffisant? ...en résumé à partir d un certain nombre de tour ce sera du pipo....t es mieux a mettre ton scoot sur la béquille centrale, un capteur de tour sur le vilebrequin et un autre sur la roue arrière....j pige pas bien le concept du mec qui a sorti ça? c'est quoi ? c'est un fake ce truc ou une escroquerie pour ceux qui vont l acheter? C'est vraiment pas pour faire chier mais j aime bien comprendre dsl....si tu as le poids de chaque rouleaux que vous avez estimé sur l engin ça m interesse big....parceque ce genre de système (lien www) j estime a peine à 10 kg de rouleaux et vu le diametre.... ça me parait peu....mais le calcul peut être vite fait.....y a un engrenement avec d'autres rouleaux? c'est quoi l'astuce? -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
T'as eut le temps de prendre une photo du banc big stp ? celui de ton taf? j aimerai voir ça si ça t'embête pas vu que j suis dedans en ce moment merci. Et est ce que vous aller mettre une sonde lambda dessus ou pas? moi j pense sur le mien mais j'ai un serieux doute sur son utilité? -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
Voilà un ptit test de fonctionnement des capteurs/logiciel... super pas évident de tenir l'ipad, de focus sur l'écran et d'accélèrer ....c'est un peu flou dsl la prochaine sera mieux... j mettrai le nikon et son trépied parceque là c'est vraiment degueux (pour faire bien il faudrait que je puisse faire un focus à la fois sur le compteur du scoot et sur l ecran tactile c'est pas gagné ) mais on va faire au mieux me reste à intégrer le calcul du couple, puissance, étalonner les capteurs de température (parceque 115 degres ça me parait bien haut...)et j vous remets une ptite vids bientôt... et j crois que j vais mettre l arrière plan du graphe en noir et le traçé plus épais et plus clair parceque là ça pique les yeux.... -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
oui habituellement on utilise des rouleaux mais c'est plus compliquer à trouver, là j utilise seulement ce qui me tombe sous la main...et en même temps ça change pas grand chose n est ce pas....ce qui compte au final c'est le moment d 'inertie non? le rouleau c'est juste pour ne pas avoir à monter le scooter trop haut à cause de la pente du systeme c'est tout.... ok pour l'IR, et c'est effectivement plus simple à mettre en pratique, mais c'est comme le rouleau, j en pas sous la main non plus...(et trouver un capteur IR avec un temps de réponse inferieur à 1ms c'est chaud, voire mission impossible ...)mais j pense que la précision du capteur a effet hall est largement suffisante et au dela de l'IR (freq de commutation 700hz cf. 1/T) c'est le même principe de fonctionnement qui sont proposé sur les compteur electronique Stage6... donc ça doit pas être trop mauvais... -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
bon j vous donne un indice la gravitè g= 9,81m/s^2 l'age du chat 3ans et demi! toujours po? -
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
En revenche il risque de serrer son moteur rapidement....surtout avec le fort pourcentage en silicium de c'te planète... n'est-ce pas? du coup on parlait de quoi déjà? j'ai oublié? merde nath ! t as perturbé l'artiste! On contourne l artiste nath! .... ah ça y est ça me revient....... Quelle sera la masse totale des épluchures de la pomme de terre après cet essai sachant que la perçeuse sans fil tourne à 800 tr/min avec 1min 55 d'autonomie de batterie pendant les 35 premiére secondes durant laquelle la roue dentee de diamètre 320 mm effectue un mouvement de rotation circulaire inverse symétriquement opposé au sens trigonométrique à hauteur de 1800 tr minutes sachant que c'est mon piti chat qui appuie sur le bouton de la visseuse qui lui même nécessite 47 heures de sommeil par jour dont 59min et 35 sec en ravitaillement croquettes et qu'à l'heure actuelle où j vous parle il roupille encore? ... ptain j aurais du être prof de maths en fait moi ! personne up?
-
scooter chinois banc d'essai à inertie scooter 70cc
Kymco27000 a répondu à un(e) question de Kymco27000 dans Moteur et préparation
bon! fin du soliloque sinon vous aller me prendre pour un fou lol! On me rapelle souvent de faire des choses simples alors c'est ce que j m'apprête à faire...go sur boom beach... @+++ t'habite la zone 51 nathan, au texas?? j avais justement quelques questions concernant certaines interactions des forces fondementale gravitationnelles? Combien de tour doit faire un sélénite sur la vis de richesse de son scooter 50cc pour que le truc ronronne au poil sachant que la gravité lunaire est de 1,622m/s2 ....? toujours bridé avec le pot d'origine j entends bien! ... ... Bon nath j te donne la réponse avant que tu te liquéfies.....vu que la gravité sur terre est 9,81 contre 1,622 sur la lune et que notre habitant lunaire aura beau mettre un cornet Polini .....ça marchera jamais... l essence n arrivera jamais dans la chambre de combustion y a pas d oxygène sur la lune... en resumé, la vis il peut même se la coller dans le fion ça changera rien!